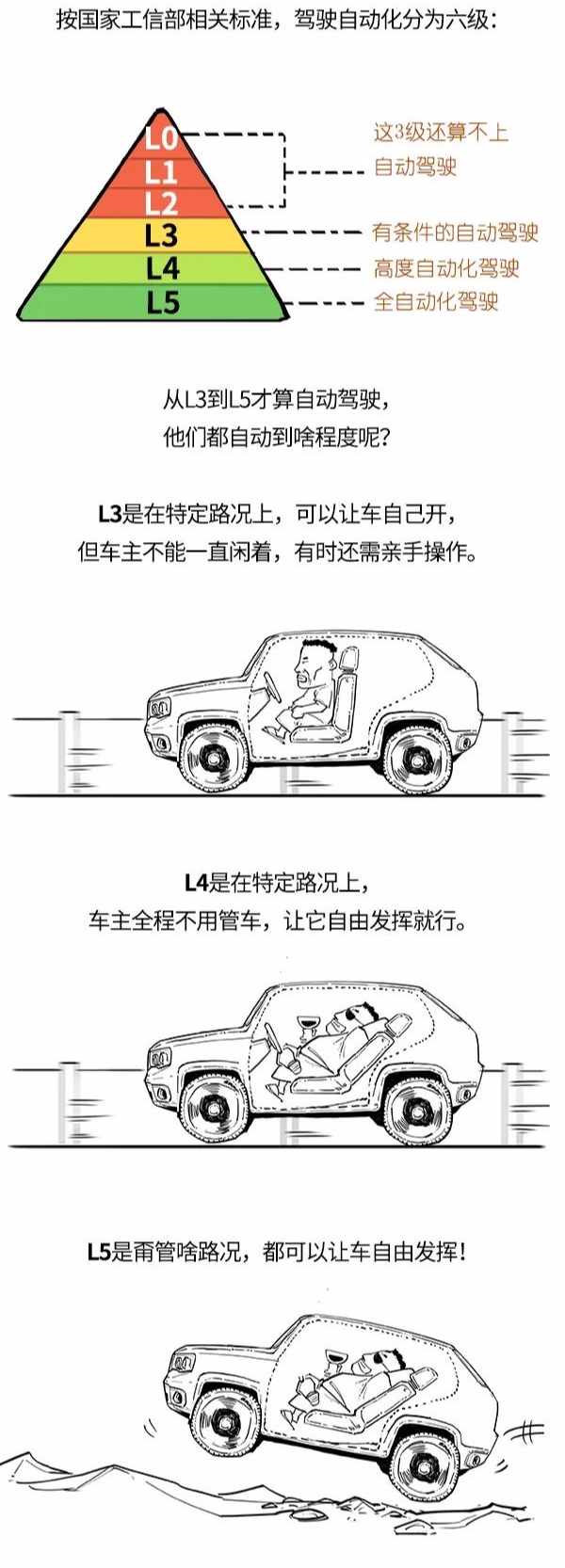
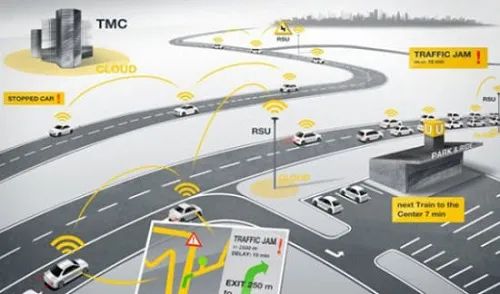
Jun 04, 2020 边缘计算构筑“车路协同”,赋能自动驾驶走向现实 简单地说,要实现自动驾驶完美运行,只有“聪明的车”还远远不够,还要有“智慧的路”、“智能的通信”等等…需要汽车工业、智能交通基础设施、新一代通信网络等领域共同发力。车路协同—自动驾驶的必由之路在自动驾驶这条赛道上,国内和国外跑出了不同的发展路线。国内是以Apollo为代表的车路协同,国外则是以Waymo为代表的单车智能。单车智能主要依靠传感器实现,这样就会造成传感器大量堆砌,从而使单车成本升高。更为重要的是,单车感知总会因为前车的遮挡、或道路的凹陷凸起等存在视觉盲区,存在安全隐患。与单车智能相比,车路协同能够有效弥补感知上的盲点,让自动驾驶由过去的单兵作战转变为有组织的高效协同合作。特别是在国家大力推进新基建的背景下,车路协同项目已大批落地,加速自动驾驶产业成熟。我国自动驾驶落地项目2019年,上海市启动洋山港智能重卡示范运营项目。致力于实现5G环境下运用智能重卡技术开展港口智能化运输作业,加快建设具有全球领先水平的智慧港口。运营线路全长40.75公里,以深水港物流园区重箱堆场为起始点,通过海关闸口,经东海大桥,到洋山港区,实现循环运行的业务闭环。目前,项目已开展东海大桥及相关区域智能重卡道路测试。2020年5月17日,江苏省启动智慧高速公路应用技术研究与工程示范。将开展“货车专用道及货车自动驾驶关键技术”专题研究,设置自动驾驶车辆专用车道,探索货车自动驾驶与编队驾驶的实现路径。研究成果预计将在2022年上半年依托沪宁高速、苏通大桥、江阴大桥等路段在工程实施中实现落地应用,初步具备货车进行L3级别自动驾驶的行驶条件。山东省原滨莱高速苗山至博山26km高速公路进行智能化、网络化、数字化改造和附属基础设施建设,打造国内「测试里程最长、测试场景最丰富、测试环境最真实」的自动驾驶、车路协同高速公路测试基地。车路协同的核心组成部分一般来说,车路协同主要涉及三个端口:车端、路侧端和云端,其中路侧端和云端因为车路协同环境下计算节点下沉至边缘层(即路侧)的需求而经常被同时提及。再考虑到三个端口间信息传输渠道的重要性,对于车路协同系统平台更完善的拆解方式,“车路协同”应当是以下三个核心组成部分:智能车载系统(车端)、智能路侧系统(路侧端+云端)和通信平台。其中,智能车载系统负责车载端的海量数据实时处理和多传感器数据融合,保证车辆在各种复杂的情况下稳定、安全行驶;智能路侧系统负责路况信息搜集与边缘侧计算,完成对路况的数字化感知和就近云端算力部署;通信平台负责提供车-车、车-路间实时传输的信息管道,通过低延时、高可靠、快速接入的网络环境,保障车端与路侧端的信息实时交互。——三者恰好构成智慧交通场景下协同感知与协同决策的闭环。低延时、高性能边缘计算终端—ZBOXZBOX MAGNUS EN系列不仅体积小巧而且性能强劲,配备Intel Core i7高性能处理器及GeForce RTX 20系列独显,可同时执行多个运算密集的工作负载。记忆体及存储的扩充空间更是相当庞大,不但支持高达64GB的高速 DDR4 记忆体、NVMe M.2 SSD 固态硬盘、2.5 英寸的大容量存储,更兼容高性能 Intel Optane 内存技术,令 MAGNUS EN 能实时高速处理数据。边缘计算服务器不仅需要性能强劲,还要覆盖更多应用,环境适应性要好,能部署更多的特殊或简陋环境。由于车载系统对硬件结构稳定性要求更高,ZBOX针对车载系统的震动问题优化产品结构,同时针对车载系统供电进行优化,让硬件更匹配车载系统场景应用。ZBOX EN系列自带丰富接口,具有极强外界环境适应性,多样化的安装方式,亦完美适配如VR主题乐园、智能数字标牌、新零售等场景的实时业务需求。 返回列表